

Vibration suppression method for robot abrasive belt polishing of narrow space parts
-
摘要: 提出一种航空狭窄空间薄壁件机器人砂带磨抛振动抑制方法,以提高加工振动稳定性以及加工工件的表面质量。首先,通过建立航空薄壁件机器人磨抛动力学模型,分析影响振动稳定性的关键工艺参数;其次,通过增加阻尼的方式对传统砂带机进行改进,采用被动振动控制的方法对机器人砂带磨抛过程中的振动进行抑制;最后,设计正交试验进行磨抛参数优化,并对优化后砂带机的抑振效果进行验证。通过对实验采集的振动信号进行分析可知,优化后的抑振砂带机相较于传统砂带机振幅降低约38.8%,其加工后的叶轮叶片表面粗糙度Ra降至0.4 μm以下。实验结果表明:抑振砂带机可达性良好,且在加工薄壁件时能显著抑制机器人砂带磨抛过程中的振动;采用抑振砂带机磨抛时,适当降低砂带线速度和进给速度、采用接口较软的砂带可以进一步抑制磨抛过程中的振动。Abstract:
Objectives With the rapid development of the aviation industry, the surface quality requirements for critical aero-engine components such as integrally bladed disks and integrally bladed rotors have increased. These components have narrow blade passages and poor accessibility, making traditional grinding tools prone to interference. Moreover, the weak stiffness of thin-walled parts and the grinding system can cause severe vibrations during robotic grinding, leading to surface defects and irreversible damage, thus limiting processing quality. This study proposes a vibration suppression method for thin-walled parts in confined spaces to reduce grinding vibrations and improve surface quality and stability. Methods A combined approach of theoretical modeling, tool optimization, and experimental validation is used. First, a dynamic model of robotic grinding for thin-walled parts is established, considering both flutter and forced vibrations, to identify key process parameters affecting vibration stability. A passive vibration control method is then applied by adding a spring damper to the traditional belt grinder to increase system damping and by downsizing the tool for better accessibility. Finally, orthogonal experiments are designed to optimize key process parameters and validate the vibration suppression effect of the optimized belt grinder. Results The dynamic model indicates that contact force, belt speed, feed rate, and system damping significantly affect vibration stability. Analysis of the forced vibration model shows that damping effectively reduces vibration amplitude near resonance frequencies. Experimental vibration signals shows that the optimized belt grinder reduces vibration amplitude by approximately 38.8% compared to the traditional one. Mean analysis of vibration experiments reveals that belt speed and belt joint stiffness negatively correlate with vibration stability, while contact force and feed rate show a decreasing-increasing trend. Range analysis indicates that belt speed and feed rate have the greatest impact on vibration stability, suggesting these parameters should be closely controlled during grinding. After grinding with the optimized belt grinder, the blade surface is smooth and free of vibration marks, with surface roughness Ra reduced to below 0.4 μm, meeting technical requirements. Conclusions Passive vibration control and parameter optimization are used to suppress vibrations during robotic grinding of thin-walled parts. The vibration-suppressing belt grinder, with increased damping and a downsized design, effectively reduces grinding vibrations, enabling interference-free grinding in confined spaces and achieving high surface quality. Orthogonal experiments shows that feed rate and belt speed significantly affect vibration stability. Reducing belt speed and feed rate and using softer belt joints can further suppress vibrations during grinding. -
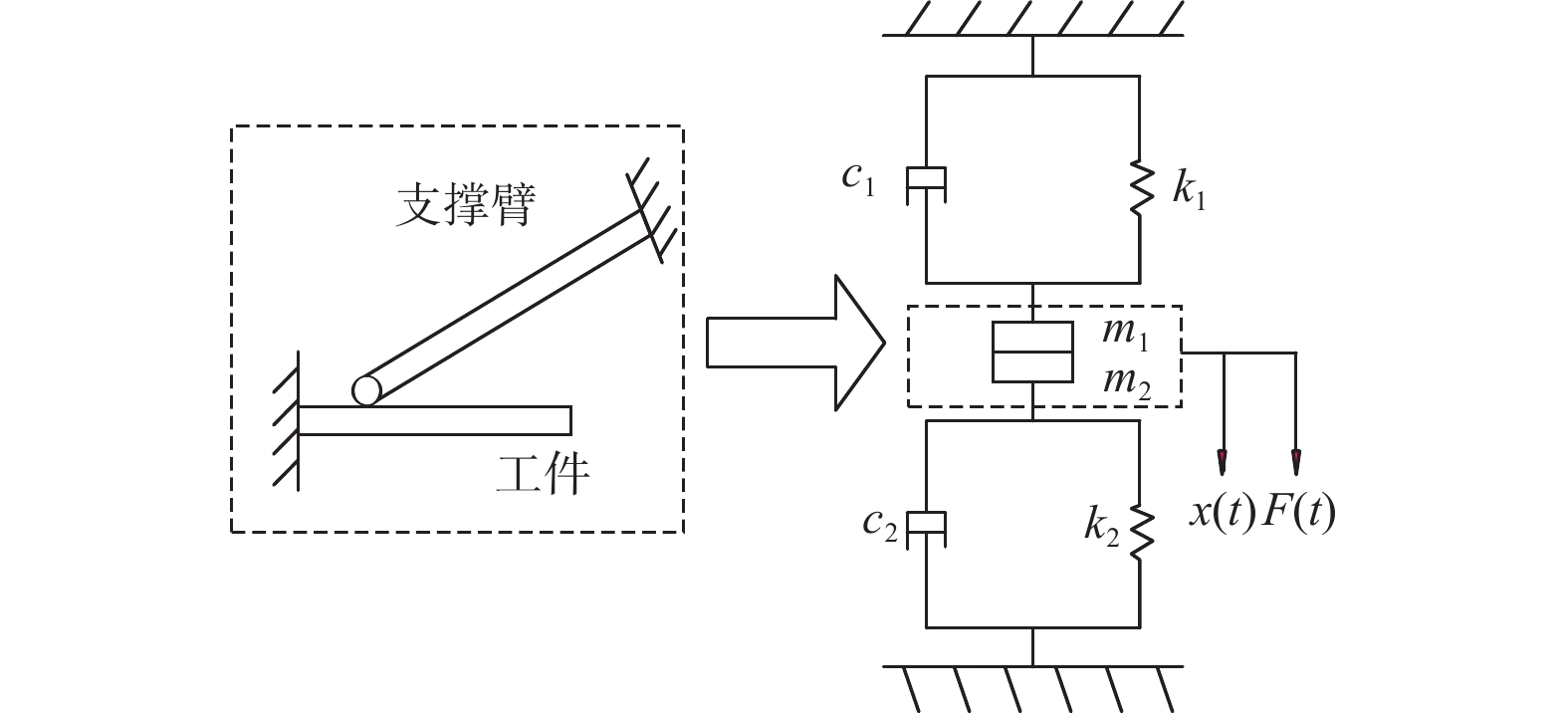
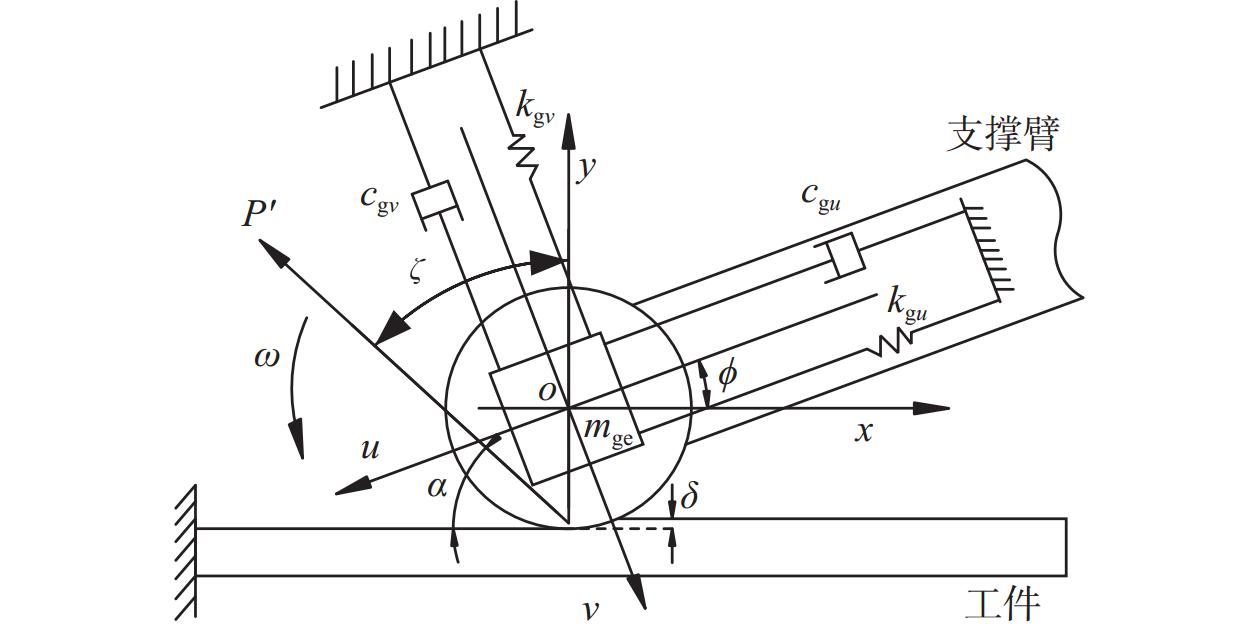
图 2 磨抛系统单自由度振动模型
Figure 2. Single degree of freedom vibration model of grinding and polishing system
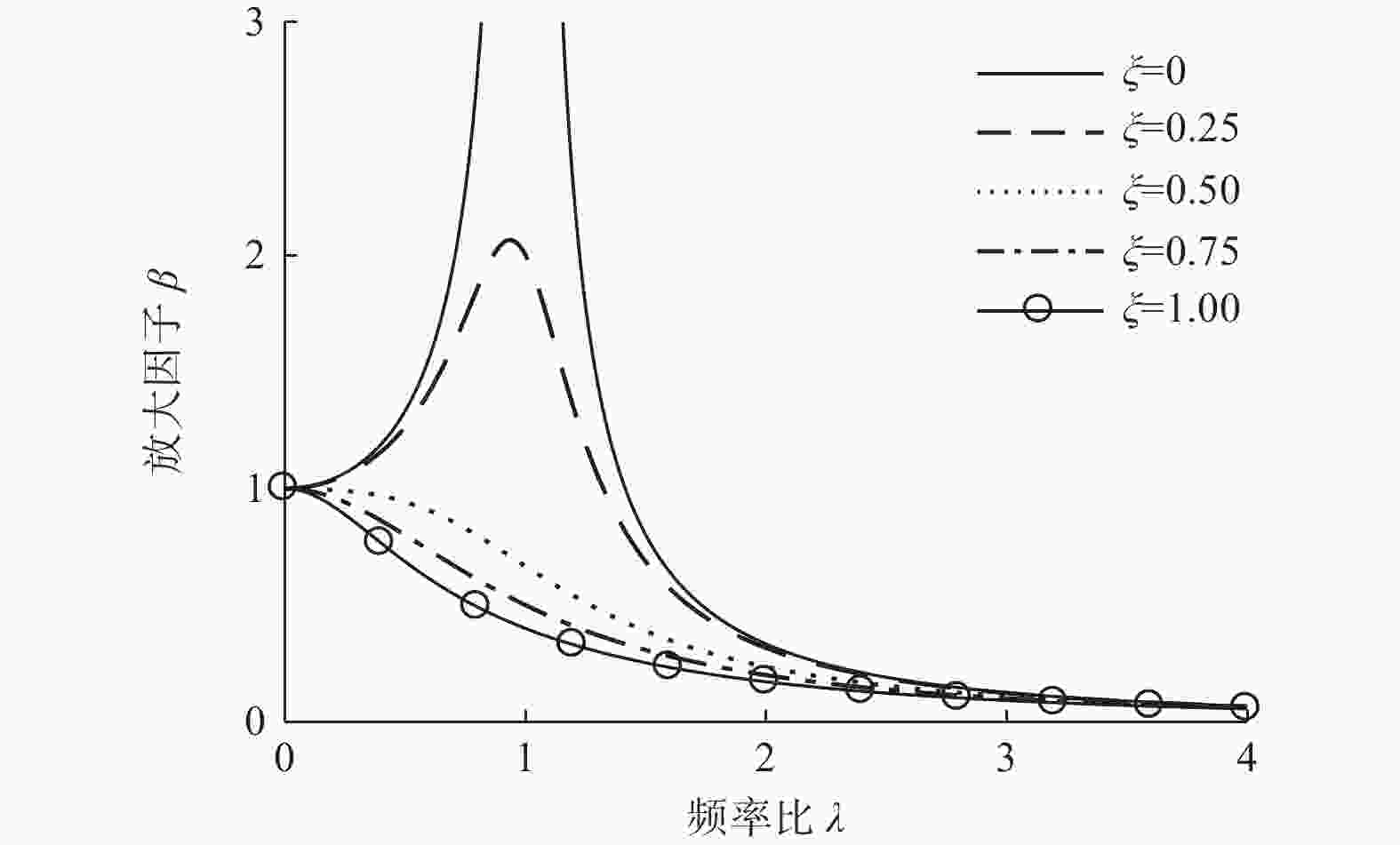
图 3 不同阻尼比和频率比下的放大因子
Figure 3. Amplification factors for different damping ratios and frequency ratios
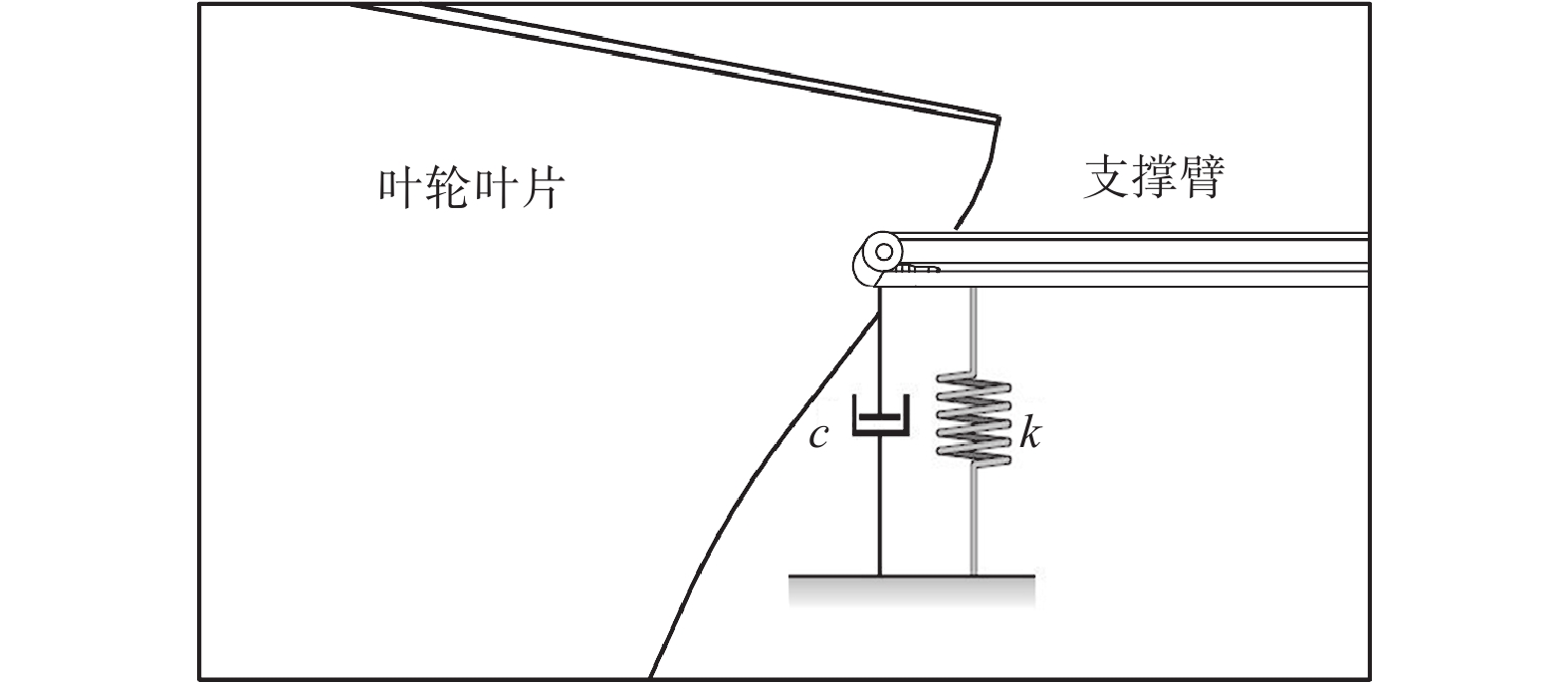
图 5 抑振砂带机工作原理
Figure 5. Working principle of vibration suppression abrasive belt machine
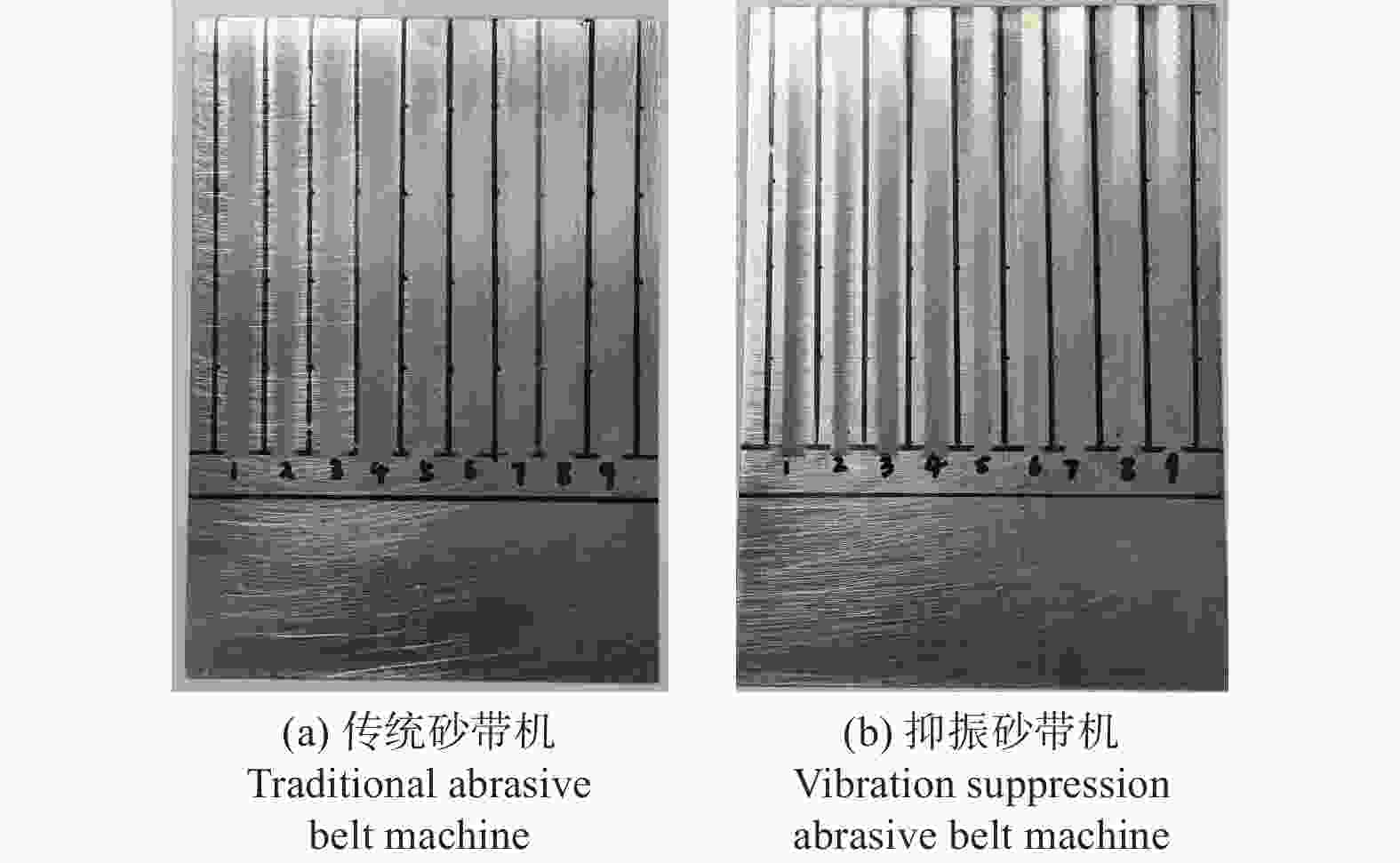
图 7 不同砂带机磨抛后试件
Figure 7. Workpieces processed by different abrasive belt grinding systems
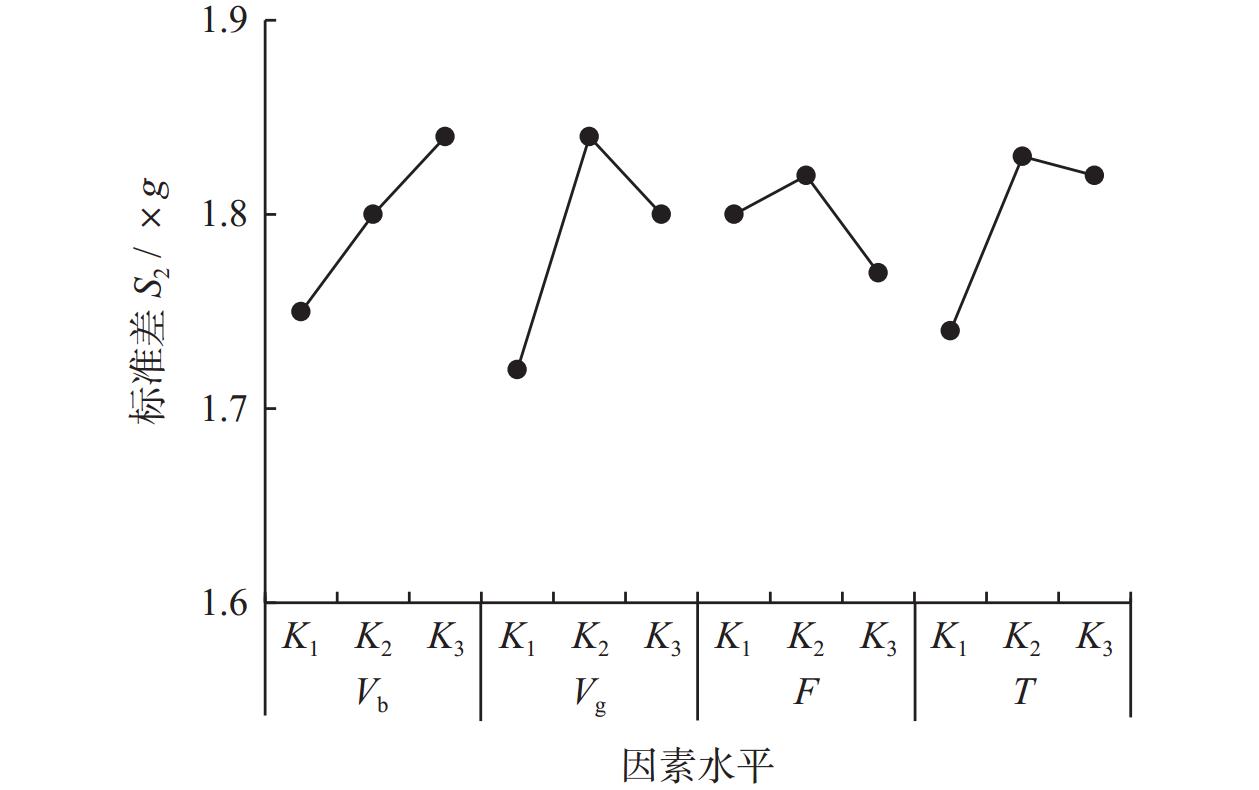
图 9 各因素在不同水平下的$ {S}_{2} $平均值
Figure 9. S2 average values of each factor at different levels
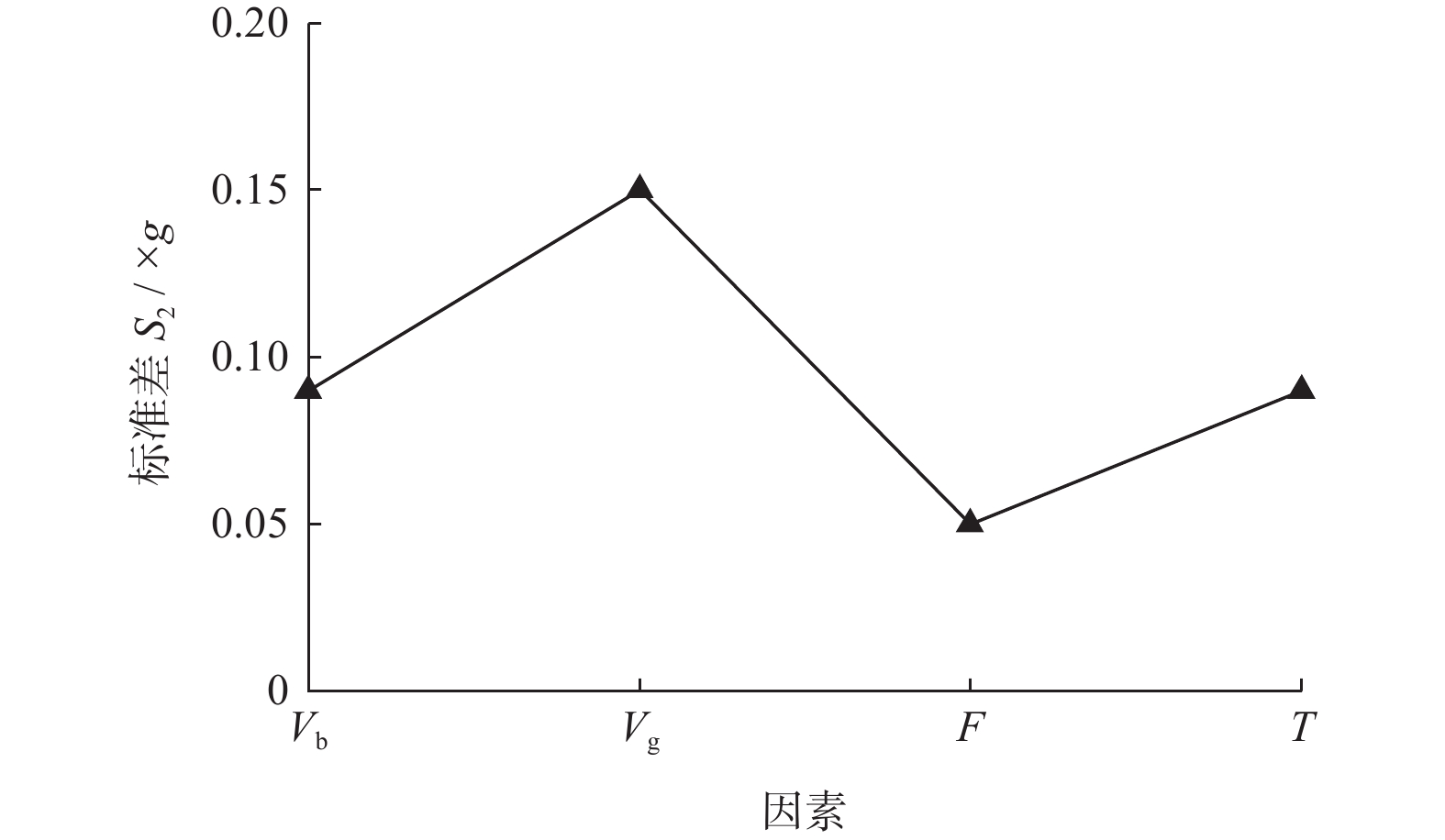
图 10 不同因素下$ {S}_{2} $的极差值
Figure 10. Range values of S2 under different experimental factors
表 1 正交试验设计表
Table 1. Orthogonal experimental design table
水平 因素 砂带线速度
Vb / (m·s−1)进给速度
Vg / (m·s−1)接触力
F / N砂带类型 T 1 8 6 1 1# 2 9 19 1.5 2# 3 10 32 2 3#  下载: 导出CSV
下载: 导出CSV
表 2 机器人砂带磨抛其他参数
Table 2. Other parameters of robot abrasive belt grinding and polishing
参数 数值 走刀长度 l / mm 100 砂带宽度 $ {w}_{\mathrm{s}} $ / mm 8 接触轮宽度 $ {w}_{\mathrm{j}} $ / mm 6 接触角 $ \phi $ / (°) 35
下载: 导出CSV
表 3 正交试验结果分析表
Table 3. Analysis table of orthogonal experiment results
编号 砂带线速度
Vb / (m·s−1)进给速度
Vg / (m·s−1)接触力
F / N砂带类
型T$ {S}_{1} $/$ {S}_{2} $ 降低百
分比/%1 8 6 1 1# 2.64/1.62 38.6 2 8 19 1.5 2# 2.84/1.81 36.3 3 8 32 2 3# 2.57/1.81 29.6 4 9 6 1.5 3# 3.04/1.70 44.1 5 9 19 2 1# 4.03/1.87 53.6 6 9 32 1 2# 3.12/1.84 41.0 7 10 6 2 2# 2.22/1.83 17.6 8 10 19 1 3# 3.54/1.94 45.2 9 10 32 1.5 1# 3.06/1.74 43.1 $ {K}_{1} $ 1.75 1.72 1.80 1.74 $ {K}_{2} $ 1.80 1.87 1.82 1.83 $ {K}_{3} $ 1.84 1.80 1.77 1.82
下载: 导出CSV
-
[1] 陈霖. 航空发动机整体叶盘机器人磨抛工艺与参数优化 [D]. 武汉: 华中科技大学, 2020.CHEN Lin. Robotic blisk grinding process andparameter optimization for aero engine [D]. Wuhan: Huazhong University of Science and Technology, 2020. [2] 李鼎威. 面向航空发动机整体叶盘的机器人力控磨抛技术 [D]. 武汉: 华中科技大学, 2020.LI Dingwei. Mechanical manual grinding and polishing technology for aero-engine integral blade disk [D]. Wuhan: Huazhong University of Science and Technology, 2020. [3] 刘海波, 张鸿泽, 王诚鑫, 等. 基于附加质量和电涡流阻尼的薄壁件铣削振动抑制 [J]. 航空制造技术, 2023, 66(3): 53-60. doi: 10.16080/j.issn1671-833x.2023.03.053LIU Haibo, ZHANG Hongze, WANG Chengxin, et al. Vibration suppression of thin-walled parts based on additional mass and eddy current damping [J]. Aeronautical Manufacturing Technology, 2023, 66(3): 53-60. doi: 10.16080/j.issn1671-833x.2023.03.053 [4] 肖贵坚. 整体叶盘型面开式砂带精密磨削方法及其实验研究 [D]. 重庆: 重庆大学, 2016.XIAO Guijian. Experimental research on the precisiongrinding method of blisk with open-loopabrasive belt [D]. Chongqing: Chongqing Univer-sity, 2016. [5] 段继豪, 史耀耀, 李小彪, 等. 整体叶盘柔性磨头自适应抛光实现方法 [J]. 航空学报, 2011, 32(5): 934-940.DUAN Jihao, SHI Yaoyao, LI Xiaobiao, et al. Adaptive polishing for blisk by flexible grinding head [J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(5): 934-940. [6] 李长城, 郭润兰, 黄华. 考虑材料去除对薄壁工件铣削稳定的影响性研究 [J]. 制造业自动化, 2020, 42(10): 95-99,103. doi: 10.3969/j.issn.1009-0134.2020.10.021LI Changcheng, GUO Runlan, HUANG Hua. Study on the influence of considering material removal on milling stability of thin-walled workpieces [J]. Manufacturing Automation, 2020, 42(10): 95-99,103. doi: 10.3969/j.issn.1009-0134.2020.10.021 [7] 王健, 何立东, 杨建江. 基于主动阻尼技术的薄壁件铣削振动控制研究 [J]. 机电工程, 2022, 39(2): 262-268. doi: 10.3969/j.issn.1001-4551.2022.02.018WANG Jian, HE Lidong, YANG Jianjiang. Vibration control of milling thin-walled workpieces based on active damping technology [J]. Journal of Mechanical & Electrical Engineering, 2022, 39(2): 262-268. doi: 10.3969/j.issn.1001-4551.2022.02.018 [8] JIANG X H, ZHAO G K, LU W W. Vibration suppression of complex thin-walled workpiece based on magnetorheological fixture [J]. The International Journal of Advanced Manufacturing Technology, 2020, 106(3): 1043-1055. doi: 10.1007/s00170-019-04612-2 [9] 宋伟志, 阿俊利, 刘志恩, 等. 基于非线性吸振器的薄壁件切削振动控制 [J]. 工具技术, 2023, 57(1): 83-88. doi: 10.3969/j.issn.1000-7008.2023.01.014SONG Weizhi, A Junli, LIU Zhien, et al. Vibration control in milling of thin-walled parts based on nonlinear dynamic vibration absorber [J]. Tool Engineering, 2023, 57(1): 83-88. doi: 10.3969/j.issn.1000-7008.2023.01.014 [10] 程明迪, 郭家杰, 李卓, 等. 基于电涡流阻尼的薄壁盘加工振动抑制 [J]. 机械工程学报, 2018, 54(17): 76-84. doi: 10.3901/JME.2018.17.076CHENG Mingdi, GUO Jiajie, LI Zhuo, et al. Vibration suppression for thin-wall plate machining using eddy current damping [J]. Journal of Mechanical Engineering, 2018, 54(17): 76-84. doi: 10.3901/JME.2018.17.076 [11] 匡民兴. 基于被动力控制的机器人砂带磨抛振动抑制研究 [D]. 武汉: 华中科技大学, 2022.KUANG Minxing. Research on vibration suppression of robotic beltgrinding based on passive dynamic control [D]. Wuhan: Huazhong University of Science and Technology, 2022. [12] HUANG H, GONG Z M, CHEN X Q, et al. Robotic grinding and polishing for turbine-vane overhaul [J]. Journal of Materials Processing Technology, 2002, 127(2): 140-145. doi: 10.1016/S0924-0136(02)00114-0 [13] CHEN F, ZHAO H, LI D W, et al. Contact force control and vibration suppression in robotic polishing with a smart end effector [J]. Robotics and Computer-Integrated Manufacturing, 2019, 57: 391-403. doi: 10.1016/j.rcim.2018.12.019 [14] 张义泽. 面向机器人砂带磨抛的被动柔顺技术研究 [D]. 武汉: 华中科技大学, 2020.ZHANG Yize. Research on robotic abrasive belt grinding with passive compliance technology [D]. Wuhan: Huazhong University of Science and Technology, 2020. [15] HUANG Y, HE S, XIAO G J, et al. Effects research on theoretical-modelling based suppression of the contact flutter in blisk belt grinding [J]. Journal of Manufacturing Processes, 2020, 54: 309-317. doi: 10.1016/j.jmapro.2020.03.021 [16] 李成辉. 振动理论与分析基础 [M]. 成都: 西南交通大学出版社, 2015.LI Chenghui. Fundamentals of vibration theory and analysis [M]. Chengdu: Southwest Jiaotong University Press, 2015. -

 下载:
下载:











 点击查看大图
点击查看大图
计量
- 文章访问数: 28
- HTML全文浏览量: 16
- PDF下载量: 3
- 被引次数: 0
 邮件订阅
邮件订阅 RSS
RSS
